Управление роботом является сложной задачей. Определение, которое мы выбрали для , требует, чтобы устройство получало данные о своей среде. Затем принимало решение и предпринимало соответствующие действия. Роботы могут быть автономными и полуавтономными.
- Автономный робот работает по заданному алгоритму исходя из поступающих от датчиков данных.
- У полуавтономного робота есть задачи, которые контролируются человеком. И дополнительно есть другие задачи, которые он выполняет сам по себе...
Полуавтономные роботы
Хорошим примером полуавтономного робота является сложный подводный робот. Человек контролирует основные движения робота. И в это время бортовой процессор измеряет и реагирует на подводные токи. Это позволяет держать робота в одном и том же положении без дрейфа. Камера на борту робота отправляет видео обратно человеку. Дополнительно бортовые датчики могут отслеживать температуру воды, давление и многое другое.
Если робот теряет связь с поверхностью, то включается автономная программа и поднимает подводного робота на поверхность. Для того, чтобы иметь возможность управлять своим роботом, нужно будет определить его уровень автономности. Возможно вы хотите чтобы управление роботом осуществлялось по кабелю, было беспроводное или полностью автономное.
Управление по кабелю
Самый простой способ управления роботом — это ручной контроллер, физически подключенный к нему с помощью кабеля. Переключатели, ручки, рычаги, джойстики и кнопки на этом контроллере позволяют пользователю управлять роботом без необходимости включать сложную электронику.
В этой ситуации двигатели и источник питания могут быть подключены непосредственно к переключателю. Следовательно, можно контролировать его вращение вперед / назад. Это используется обычно в транспортных средствах.
Они не имеют интеллекта и считаются скорее «дистанционно управляемыми машинами», чем «роботами».

- Основными преимуществами такого подключения является то, что робот не ограничивается временем работы. Так как он может быть подключен непосредственно к сети. Не нужно беспокоиться о потере сигнала. Робот, как правило, имеет минимум электроники и не очень сложный. Сам робот может быть легким или иметь дополнительную полезную нагрузку. Робота можно извлечь физически при помощи троса, прикрепленного к кабелю, если что-то пойдет не та. Это особенно актуально для подводных роботов.
- Основными недостатками является то, что трос может запутаться, зацепиться за что-то, или оборваться. Расстояние, на которое можно отправить робота, ограничено длиной троса. Перетаскивание длинного троса добавляет трение и может замедлить или даже остановить движение робота.
Управление роботом при помощи кабеля и встроенного микроконтроллера
Следующим шагом будет установка микроконтроллера на робота, но при этом продолжать использовать кабель. Подключение микроконтроллера к одному из портов ввода / вывода вашего компьютера (например, USB-порт) позволяет вам управлять своими действиями. Управление происходит с помощью клавиатуры, джойстика или другого периферийного устройства. Добавление микроконтроллера в проект также может потребовать, чтобы вы запрограммировали робота на входные сигналы.

- Основные преимущества такие же, как и при непосредственном управлении по кабелю. Может быть запрограммировано более сложное поведение робота и его реакция на отдельные кнопки или команды. Имеется большой выбор управления контроллером (мышь, клавиатура, джойстик и т. д.). Добавленный микроконтроллер имеет встроенные алгоритмы. Это означает, что он может взаимодействовать с датчиками и принимать определенные решения самостоятельно.
- К недостаткам относится более высокая стоимость из-за наличия дополнительной электроники. Другие недостатки такие же как и при непосредственном управлении роботом по кабелю.
Управление по Ethernet
Используется разъём Ethernet RJ45 . Для управления нужно Ethernet соединение. Робот физически подключен к маршрутизатору. Следовательно его можно контролировать через Интернет. Также это возможно (хотя и не очень практично) для мобильных роботов.
Настройка робота, который может общаться через Интернет, может быть довольно сложной. В первую очередь предпочтительным является соединение WiFi (беспроводной интернет). Проводная и беспроводная комбинация также являются опцией, где есть приемопередатчик (передача и прием). Приемопередатчик физически подключен к Интернету, и данные, полученные через Интернет, затем передаются беспроводным способом роботу.

- Преимуществами является то, что робота можно контролировать через интернет из любой точки мира. Робот не ограничен по времени работы, так как он может использовать Power over Ethernet. PoE. Это технология, которая позволяет передавать удалённому устройству электрическую энергию вместе с данными через стандартную витую пару по сети Ethernet. Использование интернет-протокола (IP) может упростить и улучшить схему связи. Преимущества те же, что и при прямом проводном компьютерном управлении.
- Недостатком является более сложное программирование и те же недостатки, что и при управлении по кабелю.
Управление при помощи ИК-пульта
Инфракрасные передатчики и приемники исключают кабель, соединяющий робота с оператором. Это, как правило, используется начинающими. Для работы инфракрасного управления требуется «линия визирования». Приемник должен иметь возможность «видеть» передатчик в любое время, чтобы получать данные.
Инфракрасные пульты дистанционного управления (такие, как универсальные пульты дистанционного управления, для телевизоров), используются для отправки команд инфракрасному приемнику, подключенному к микроконтроллеру. Он затем интерпретирует эти сигналы и контролирует действия робота.

- Преимуществом является низкая стоимость. Для управления роботом можно использовать простые пульты дистанционного управления телевизором.
- Недостатки в том, что требуется прямая видимость для управления.
Радиоуправление
Для управления при помощи радиочастот требуется передатчик и приемник с небольшими микроконтроллерами для отправки, приема и интерпретации данных, передаваемых по радиочастоте (RF). В коробке приемника имеется печатная плата (печатная плата), которая содержит приемный блок и небольшой контроллер сервомотора. Для радиосвязи требуется передатчик, согласованный / сопряженный с приемником. Возможно использование трансивера, который может отправлять и принимать данные между двумя физически разными средами систем связи.
Радиоуправление не требует прямой видимости и может быть осуществлено на большом расстоянии. Стандартные радиочастотные устройства могут обеспечивать передачу данных между устройствами на расстоянии до нескольких километров. В то время как более профессиональные радиочастотные устройства могут обеспечивать управление роботом практически на любом расстоянии.

Многие конструкторы роботов предпочитают изготавливать полуавтономных роботов с радиоуправлением. Это позволяет роботу быть максимально автономным, обеспечивать обратную связь с пользователем. И может давать пользователю некоторый контроль над некоторыми его функциями в случае необходимости.
- Преимуществами является возможность управлять роботом на значительных расстояниях, может просто настраиваться. Связь является всенаправленной, но может не проходить сигнал полной блокировке стенами или препятствиями.
- Недостатками является очень низкая скорость передачи данных (только простые команды). Дополнительно нужно обращать внимание на частоты.
Управление по Bluetooth
Bluetooth является радиосигналом (RF) и передается по определенным протоколам для отправки и получения данных. Обычный диапазон Bluetooth часто ограничен примерно 10 м. Хотя он имеет то преимущество, что позволяет пользователям управлять своим роботом через устройства с поддержкой Bluetooth. Это в первую очередь сотовые телефоны, КПК и ноутбуки (хотя для создания интерфейса может потребоваться настраиваемое программирование). Так же, как и радиоуправление, Bluetooth предлагает двустороннюю связь.

- Преимущества: управляемый с любого устройства с поддержкой Bluetooth. Но, как правило, требуется дополнительное программирование. Это смартфоны, ноутбуки и т.д. Более высокие скорости передачи данных могут быть всенаправленными. Следовательно, не нужна прямая видимость и сигнал может немного проходить через стены.
- Недостатки. Должен работать в паре. Расстояние обычно составляет около 10 м (без препятствий).
Управление по WiFi
Управление по WiFi часто является дополнительной опцией для роботов. Способность управлять роботом по беспроводной сети через Интернет представляет некоторые существенные преимущества (и некоторые недостатки) для беспроводного управления. Чтобы настроить управление роботом по Wi-Fi нужен беспроводной маршрутизатор, подключенный к Интернету, и блок WiFi на самом роботе. Для робота можно использовать устройство, которое поддерживает TCP / IP протокол.

- Преимуществом является возможность управлять роботом из любой точки мира. Для этого нужно чтобы он находился в пределах диапазона беспроводного маршрутизатора. Возможна высокая скорость передачи данных.
- Недостатки то, что необходимо программирование. Максимальное расстояние обычно определяется выбором беспроводного маршрутизатора.
Управление при помощи сотового телефона
Другая беспроводная технология, которая была первоначально разработана для связи человека и человека — сотовый телефон, теперь используется для управления роботами. Поскольку частоты сотового телефона регулируются, включение сотового модуля на робота обычно требует дополнительного программирования. Также не нужно понимания системы сотовой сети и правил.

- Преимущества: робота можно контролировать в любом месте, где есть сотовый сигнал. Возможна спутниковая связь.
- Недостатки; настройка управления по сотовой связи могут быть сложными — не для начинающих. В каждой сотовой сети есть свои собственные требования и ограничения. Обслуживание в сети не является бесплатным. Обычно чем больше данных вы передаете, тем больше денег вам надо заплатить. Система пока еще не настроена для использования в робототехнике.
Следующим шагом будет использование микроконтроллера в вашем роботе в полном объеме. И в первую очередь программирование его алгоритма работы по вводу данных от его датчиков. Автономное управление может осуществляться в различных формах:
- быть предварительно запрограммировано без обратной связи с окружающей средой
- с ограниченной обратной связью с датчиками
- со сложной обратной связью с датчиками
Настоящее автономное управление включает в себя множество датчиков и алгоритмов. Они позволяют роботу самостоятельно определять лучшее действие в любой заданной ситуации. Самые сложные методы управления, которые в настоящее время реализуются на автономных роботах, являются визуальными и слуховыми командами. Для визуального контроля робот смотрит на человека или объект, чтобы получить свои команды.

Управление роботом для поворота налево при помощи чтения с листа бумаги стрелки, указывающей влево, намного сложнее выполнить, чем можно было бы представить. Служебная команда, такая как «повернуть налево», также требует довольно много программирования. Программирование множества сложных команд, таких как «Принесите мне тапочки» уже не фантазия. Хотя требует очень высокого уровня программирования и большого количества времени.
- Преимущества – это ”настоящая" робототехника. Задачи могут быть очень простым, например, от мигания света, основанного на показаниях одного датчика. До посадки космического корабля на далекой планете.
- Недостатки зависят только от программиста. Если робот делает что-то, чего вы не хотите чтобы он делал, то у вас есть единственный вариант. Это проверить свой код, изменить его и загрузить изменения в робота.
Практическая часть
Целью нашего проекта является создание автономной платформы, способной принимать решение, основанное на внешних сигналах от датчиков. Мы будем использовать микроконтроллер Lego EV3. Он нам позволяет сделать как полностью автономную платформу. Так и полуавтономную, управляемую по Bluetooth или при помощи инфракрасного пульта управления.

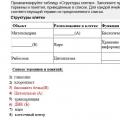
Программируемый блок LEGO EV3
Сегодня никого не удивишь радиоуправляемыми самоделками . Но согласитесь, как-то «по старинке» нажимать на клавиши управления… Гораздо интереснее управлять поделками с помощью движений кисти, не так ли? В данной статье показан пример того, как можно организовать дистанционное управление при помощи платы Arduino и нескольких датчиков изгиба. В качестве подопытного будет выступать PHIRO Pro
Шаг 1: Что понадобится

- Датчики изгиба;
- Arduino UNO;

- Bluetooth модуль HC-05;

- Перчатка;

- Джамперы;

- 9B батарея;

- Приложение Pocket Code.
Шаг 2: Загружаем стандарт Firmata на Arduino

Необходимо загрузить стандарт firmata на плату Ардуино, для того, что соединить её с Pocket Code. В данном проекте используем Arduino UNO, однако может быть использована любая плата Arduino.

- Подключаем плату Arduino к компьютеру/ноутбуку.
- В Arduino ID выбираем COM Port. Tools -> Serial Port -> Corresponding COM Port
- Далее выбираем тип платы. Tools -> Board -> Your Arduino Board
- Затем выбираем стандарт Firmata. Examples -> Firmata -> Standard Firmata
- Нажимаем «Upload» и загружаем код на плату.

Шаг 3: Соединяем датчики с платой и крепим их на перчатку

Датчики изгиба — это резистивные устройства, что могут использоваться для фиксации сгибания или наклона. Ниже приводится схема подключения датчиков на Arduino. Для того, чтобы надежно закрепить датчики на перчатке использовал согнутые скобки для степлера, однако вы можете при желании использовать пластиковые стяжки.

Шаг 4: Подсоединяем Bluetooth модуль HC-05 к Arduino

Соединяем выводы bluetooth модуля и платы Arduino следующим образом:
- HC05 Tx — Arduino Rx
- HC05 Rx — Arduino Tx
- Vcc — 5V
- GND — GND
Шаг 5: Соединяем Arduino с батареей

Используем 9В батарею для питания платы Arduino с Bluetooth модулем. Такой тип компоновки объясняется возможностью легкого монтажа на запястье/браслете. Чем компактнее тем лучше.
Шаг 6: Программа Pocket Code

Ниже представлены примеры использования программы. Прежде всего убедитесь, что PHIRO Pro находится в Mode 3 (Bluetooth Mode). Нажмите на кнопку Mode на PHIRO не раньше, чем синий светодиод, что расположен рядом с дисплеем на верху, включится.

Для программы, в общем есть 7 режимов.

- Указательный палец выпрямлен. Фары светятся красным. Программа показывает STOP.
- Указательный и средний палец выпрямлены. Фары светятся зеленым. Программа показывает STOP.
- Указательный, средний и безымянный пальцы выпрямлены. Фары светятся синим. Программа показывает STOP.
- Ладонь открыта. PHIRO движется вперёд. Фары светятся белым. Программа показывает FORWARD (вперёд).
- Ладонь сжата в кулак. PHIRO останавливается. Фары выключены. Программа показывает STOP.
- Ладонь сжата в кулак и наклонена влево (телефон наклонён влево). PHIRO поворачивает налево. Левая фара светится желтым. Программа показывает LEFT (влево).
- Ладонь сжата в кулак и наклонена вправо (телефон наклонён вправо). PHIRO поворачивает вправо. Правая фара светится желтым. Программа показывает RIGHT (право).

Шаг 7: Проводим финальный монтаж

Для крепления телефона на руке, можете воспользоваться наручной повязкой или сделать так, как сделал я.

Купил дешевую крышку под мой мобильник, прорезал отверстия и протянул ленту липучку. Наручная повязка с телефоном готова.
Вот и всё!) Спасибо за внимание)

Чтобы наработать опыт в работе с платой Arduino, так сказать в качестве учебного опыта и просто для интереса был создан этот проект. Целью проекта было создать автомобиль, который может автономно перемещаться, объезжая различные препятствия и не сталкиваясь с ними.
Шаг 1: Список компонентов и стоимость проекта
1. Игрушечная Машинка с радиоуправлением (radio controlled).
Стоит эта штука около 20 баксов, если у вас есть возможность потратить больше, то можете использовать и получше.
2. Arduino Uno микроконтроллер - 25 долларов
3. Motor shield для контроля электромоторов - 20 долларов 
4. GPS для навигации. Adafruit Ultimate GPS Shield - 50 долларов 
5. Магнитометр в качестве компаса для навигации. Adafruit HMC5883 Magnetometer - 10 долларов 
6. Ультразвуковой датчик расстояния, чтобы избегать препятствия. HC-SR04 - 6 долларов 
7. ЖК-дисплей для отображения состояния транспортного средства и информации. LCD Display Blue 1602 IIC, I2C TWI - 6 долларов (можете использовать другой)

8. Инфракрасный датчик и пульт.
9. Arduino sketch (программа C++).
10. Тонкая древесная плита в качестве монтажной платформы.
11. Макетные платы. Одна длинная и узкая, а другая маленькая, чтобы отдельно установить на ней магнитометр подальше от других элементов.
12. Перемычки.
13. Набор для монтажа ультразвукового датчика - 12 долларов 
14. Паяльник и припой.
Итак, в общем на всё ушло около 150 долларов, это при условии, если закупать все эти компоненты, поскольку возможно у вас уже что то имеется из этого.
Шаг 2: Шасси и монтаж платформы


Радиоуправление изъяли из ненужной игрушки, которая стоила 15 баксов.
Машинка здесь с двумя двигателями. С помощью одного движка пультом контролируется скорость движения робота, а с помощью другого контролируется рулевое управления.
Использовалась тонкая доска в качестве монтажной поверхности, на которой были прикреплены макетные платы, Arduino, ЖК и т.д. Батарейки размещены под доской и провода пропущены через просверленные отверстия.
Шаг 3: Программа
Arduino управляется через программу С ++.
Исходный код
RC_Car_Test_2014_07_20_001.ino
Шаг 4: ЖК-дисплей


Во время работы экран отображает следующую информацию:
Ряд 1:
1. TH - Задача, курс к текущей маршрутной точки
2. CH - Текущее направление робота
Ряд 2:
3. Err - Направление по компасу, показывает в каком направлении движется робот (влево или вправо)
4. Dist - Фокусное расстояние (в метрах) до текущей маршрутной точки
Ряд 3:
5. SNR - Sonar расстояние, то есть расстояние до любых объектов в передней части робота
6. Spd - Скорость робота
Ряд 4:
7. Mem - Память (в байтах). В памяти Arduino имеется 2 КБ
8. WPT n OF x - Показывает, где робот находится в списке маршрутных точек
Шаг 5: Избежать столкновения с объектами

Чтобы робот избегал препятствий, здесь использовался ультразвуковой датчик » Ping». Было решено совместить его с библиотекой Arduino NewPing, поскольку она лучше, чем простая PIng библиотека.
Библиотека была взята отсюда: https://github.com/fmbfla/Arduino/tree/master/NewPing
Датчик был установлен на бампере робота.
Remoute Control, ver. 0.1.1
(управление роботом удаленно по сети Wi-Fi с планшета в ручном режиме)
многоцелевая программа для мода OpenComputers
Программа позволяет Вам получить полный контроль над роботом, совершать множество действий удаленно, при этом видеть самого робота и его параметры.
Например, можно пробраться роботом в труднодоступные места, выгрузить уран из реактора при этом не получив облучения, построить простую конструкцию там, куда вы сами не можете пока добраться или наоборот, привезти что-то. Робот под вашим полным контролем.
Забавным применением программки является , атаки на игроков. Роботы по настройкам конфига могут производить действия, связанные с использованием предметов, включения и выключения кнопок, рычагов и механизмов и инструментов в чужом привате, хоть приват и не рушат. Можно произвести атаку и снести все опреснители игрока, солярки и ветряки, ели он не в игре и не спрятал все с крыши, или не выставил охрану и не сенсорит атакеров.
Можно прикрутить реакторную камеру к стене жертвы, запихать туда 4-х урановый стержень,в включить на роботе редстончик и подорвать стеночку в несколько блоков, если беспечный игрок-жертва заприватил дом тютелька в тютельку по краю стены, как это обычно делают игроки =).
Реактор на ИТ в настройках рушит блоки в радиусе 2-4 блоков. Есть шанс, что вы проберетесь в домик жертвы, при этом вы в укрытии и вас не видно никак.
Код программы (latest):
ПЛАНШЕТ: (pastebin get b8nz3PrH tabletRC.lua)
РОБОТ: (pastebin get 7V2fvm7L robotRC.lua)
Старые версии (old):






Требования к комплектации робота и планшета (за основу взял связанную карту , она обязательна, в роботе также обязателен контроллер инвентаря, остальное опционально. Можно выкинуть таблички и запихать контроллер ведра, немного добавить строчку и тырить жидкости и прочее. ЧЛ пока в программе не используется. Для грифа крайне желательна красная плата, магнит, большой инвентарь):
Планшет (хард возьмите сразу с установленной OS):

Робот (можно отказаться пока от ЧЛ и впихать контроллер-расширитель плат. Роботу сможете на лету тогда запихивать при необходимости WF карту или INET карту):

Сборка передатчика и его программа.
Я сделал модуль для компьютера из FTDI Basic Breakout 5/3.3V от DFrobot, довольно распространённого микроконтролера ATMEGA 328P-PU с загрузчиком Arduino и радиомодуля на основе микросхемы nRF24L01. По-сути это просто Arduino Uno с радиомодулем. Что есть, то есть. У радиомодуля есть особенность, которую я не сразу заметил: входное напряжение должно быть в диапазоне от 3 до 3.6 вольт (хотя подача на него 5 вольт его не убьёт, но работать не будет), верхняя граница логической единицы составляет 5В. Это означает то, что для подключения радиомодуля к меге не нужен преобразователь уровней между 3.3В и 5В, а вот стабилизатор на 3.3В установить нужно. У FTDI есть встроенный стабилизатор, от него я и подпитал радиомодуль.Так выглядит сам модуль (внутри и в сборке) :
Программа состоит из инициализации, стартового сообщения и обработки команд из программы управления. Так было в моём случае. Основные команды библиотеки Mirf:
#include
#include
#include
#include
#include
Эти библиотеки нужны для работы радиомодуля
Mirf.csnPin = 4 - задаёт номер пина, отвечающего за «разрешение общаться» радиомодуля и МК
Mirf.cePin = 6 - задаёт номер пина, отвечающего за режим работы радиомодуля (приёмник/передатчик)
Mirf.spi = &MirfHardwareSpi - настраивает линию SPI
Mirf.init() - инициализирует радиомодуль
Mirf.payload = 1 - размер в байтах одного сообщения (поумолчанию 16, максимум 32)
Mirf.channel = 19 - задаёт канал (0 - 127, по умолчанию 0)
Mirf.config() - задаёт параметры передачи
Mirf.setTADDR((byte *)«serv1») - переводит радиомодуль в режим передатчика
Mirf.setRADDR((byte *)«serv1») - переводит радиомодуль в режим приёмника
Mirf.send(data) - отправляет массив типа byte
Mirf.dataReady() - сообщает об окончании обработки принятых данных
Mirf.getData(data) - записать принятые данные в массив data
Прилагаю код программы передатчика.
Программа передатчика
#include
#include
#include
#include
#include
Char active;
byte data;
Void setup()
{
Serial.begin(19200);
Mirf.csnPin = 4;
Mirf.cePin = 6;
Mirf.init();
Mirf.payload = 1;
Mirf.channel = 19;
Mirf.config();
Mirf.setTADDR((byte *)«serv1»);
//сигнальное сообщение о начале работы
data=7;
Mirf.send(data);
delay(200);
}
Void loop()
{
if (Serial.available()) //Если данные готовы к считыванию
{
active=Serial.read(); // Запись данных в переменную
}
If (active=="2")
{
data=2;
}
If (active=="3")
{
data=3;
}
If (active=="4")
{
data=4;
}
If (active=="5")
{
data=5;
}
If (active=="6")
{
data=6;
}
Mirf.send(data); //Отсылаем данные
while(Mirf.isSending()); // Ждём пока данные отсылаются
}
Программа управления.
Есть одна интересная штука - Processing. Синтаксис такой же как в Arduino, только вместо void loop() там расположился void draw(). Но она становилась ещё более интересной в моей ситуации с библиотекой processing Serial, которая позволяет работать с сериал-портом. Прочитав уроки на сайте Spurkfun`а, я поигрался с миганием светодиода на подключенной к компьютеру ардуинке по клику мышки. После этого я написал программу управления роботом с клавиатуры. Прилагаю код управления с помощью стрелок. В нём, в принципе, ничего необычного нет.
Программа управления машинкой
import processing.serial.*;
import cc.arduino.*;
Serial myPort;
PFont f=createFont(«LetterGothicStd-32.vlw», 24);
Void setup()
{
size(360, 160);
stroke(255);
background(0);
textFont(f);
String portName = «XXXX»; // Сюда нужно написать имя вашего порта
myPort = new Serial(this, portName, 19200);
}
Void draw() {
if (keyPressed == false)
{
clear();
myPort.write("6");
println(«6»);
}
}
Void keyPressed()
{
// 10 - enter
// 32 - probel
// 37/38/39/40 - keys
clear();
Fill(255);
textAlign(CENTER);
//text(keyCode, 180, 80);
Switch(keyCode)
{
case 37:
text(«Edem vlevo», 180, 80);
myPort.write("1");
break;
Case 38:
text(«Edem pryamo», 180, 80);
myPort.write("2");
break;
Case 39:
text(«Edem vpravo», 180, 80);
myPort.write("3");
break;
Case 40:
text(«Edem nazad», 180, 80);
myPort.write("4");
break;
Default:
text(«Takoy kommandi net», 180, 80);
myPort.write("6");
break;
}
}
Программа приёмника.
Инициализация этой программы отличается от инициализации программы передатчика буквально одной строчкой. Ключевая команда в бесконечном цикле Mirf.getData(data). Дальше полученная команда сравнивается с числами, которым соответствуют какие-либо действия робота. Ну а дальше робот действует точно по командам. Прилагаю код программы приёмника машинки.
Программ машинки
#include
#include
#include
#include
#include
Void setup()
{
Serial.begin(9600);
PinMode(13, OUTPUT); //LED
Mirf.csnPin = 10;
Mirf.cePin = 9;
Mirf.spi = &MirfHardwareSpi;
Mirf.init();
Mirf.payload = 1;
Mirf.channel = 19;
Mirf.config();
Mirf.setRADDR((byte *)«serv1»);
}
Void loop()
{
byte data;
If(!Mirf.isSending() && Mirf.dataReady())
{
Mirf.getData(data);
Serial.println(data);
}
Switch (data)
{
case 1:
motors(-100, 100); // поворачиваем влево
break;
Case 2:
motors(100, 100); // едем прямо
break;
Case 3:
motors(100, -100); // поворачиваем вправо
break;
Case 4:
motors(-100, -100); // едем назад
break;
Default:
motors(0, 0); // стоим
break;
}
Delay(50);
}
Заключение.
Что из этого всего вышло:
Этого робота я сделал для «Клаустрофобии» . Они проводят квесты в реальности в разных городах, и как раз для одного из таких квестов организаторам понадобился радиоуправляемый робот-сапер. Мне понравилось. Это, конечно, ущербно, т.к. на фоне управления с помощью встроенных в ноутбук средств связи, но зато своё, сделанное весьма быстро и без особых проблем. Надеюсь эта статья поможет сделать нечто подобное, а, может, даже сложнее. Тут уж кому что захочется.
Теги: Добавить метки